Prototipo: Sistema robótico elevado con tres grados de libertad para rehabilitación de cadera controlado por sistemas embebidos
DOI:
https://doi.org/10.17488/RMIB.46.SI-TAIH.1523Palabras clave:
Ingeniería, Rehabilitación, Robótica, Sistemas Embebidos, TerapiaResumen
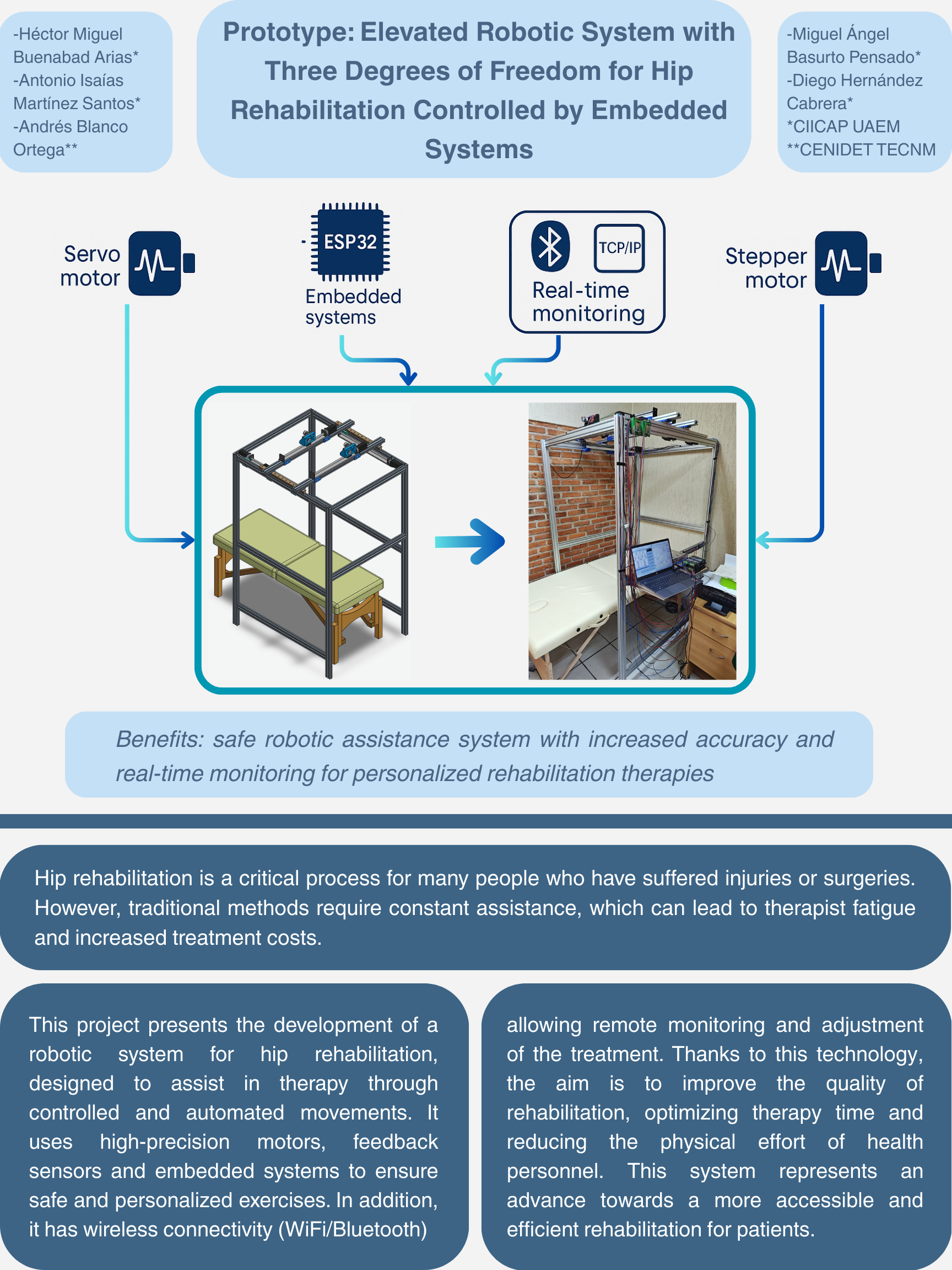
Este artículo presenta el desarrollo de un prototipo de sistema robótico que permite movimientos en ejes X-Y-Z desde una posición elevada sobre el paciente, diseñado específicamente para la rehabilitación de cadera. El sistema, controlado por sistemas embebidos, proporciona un control preciso y adaptable a las necesidades del paciente durante el proceso de rehabilitación. La estructura del robot permite movimientos controlados y ajustables, promoviendo la futura integración de rutinas, y ejercicios que imiten el rango de movimiento natural de la cadera. Además, el sistema se encuentra optimizado para ser intuitivo, garantizando eficiencia tanto al paciente como para el profesional de salud, facilitando así la rehabilitación y mejorando los resultados funcionales.
Descargas
Citas
J. Laut, M. Porfiri, y P. Raghavan, "The Present and Future of Robotic Technology in Rehabilitation," Current Physical Medicine and Rehabilitation Reports, vol. 4, no. 4, pp. 312–319, 2016, doi: https://doi.org/10.1007/s40141-016-0139-0
H. Krebs, L. Dipietro, S. Levy-Tzedek, S. Fasoli, A. Rykman-Berland, J. Zipse, y N. Hogan, "A paradigm shift for rehabilitation robotics," IEEE Engineering in Medicine and Biology Magazine, vol. 27, no. 4, pp. 61–70, 2008, doi: https://doi.org/10.1109/MEMB.2008.919498
F. Yakub, A. Z. Md. Khudzari, y Y. Mori, "Recent trends for practical rehabilitation robotics, current challenges and the future," Int. J. Rehabil. Res., vol. 37, no. 1, pp. 9–21, 2014, doi: https://doi.org/10.1097/MRR.0000000000000035
Y. Wang, X. Liu, W. Wang, Y. Shi, X. Ji, L. Hu, et al., "Adherence, efficacy, and safety of wearable technology–assisted combined home-based exercise in Chinese patients with ankylosing spondylitis: Randomized pilot controlled clinical trial," J. Med. Internet Res., vol. 24, no. 1, p. e29703, 2022.
K. S. G. Chua y C. W. K. Kuah, "Innovating with rehabilitation technology in the real world: promises, potentials, and perspectives," American Journal of Physical Medicine & Rehabilitation, vol. 96, no. 10, pp. S150-S156, 2017.
N. Ouendi, R. Hubaut, S. Pelayo, F. Anceaux, y L. Wallard, "The rehabilitation robot: factors influencing its use, advantages and limitations in clinical rehabilitation," Disabil. Rehabil. Assist. Technol., vol. 19, no. 3, pp. 546-557, 2024.
V. Palomino-Díaz, P. Romero-Sorozábal, G. Delgado-Oleas, C. Martín, I. Martínez, D. Blanco, y E. Rocon, "Diseño conceptual de una plataforma robótica para ayudar a que los niños con parálisis cerebral descubran cómo caminar," in XII Simposio CEA de Bioingeniería, vol. 83, 2021.
V. Costa, C. Sánchez, L. Perea, E. Rocon, A. Otero, y R. Raya, "Rediseño basado en la experiencia clínica de un andador robótico para la rehabilitación de fractura de cadera," Rev. Iberoam. Autom. Inform. Ind., vol. 20, no. 3, pp. 247–258, 2023.
V. A. C. Cortez, Desarrollo y validación de una plataforma de rehabilitación para fractura de cadera en personas mayores, Tesis doctoral, Univ. San Pablo, 2023.
J. X. Romero, M. A. Taco, H. C. Terán, W. Y. Romero, y D. A. Pazmiño, “Exoesqueleto robótico de cadera para movilidad coxo-femoral,” Energía Mecánica, Innovación y Futuro, vol. 11, no. 1, pp. 48–55, 2022.
S. Jacob, M. Alagirisamy, C. Xi, V. Balasubramanian, R. Srinivasan, N. Z. Jhanjhi, y S. M. Islam, “AI and IoT-enabled smart exoskeleton system for rehabilitation of paralyzed people in connected communities” IEEE Access, vol. 9, pp. 80340–80350, 2021.
S. Jacob, M. Alagirisamy, C. Xi, V. Balasubramanian, R. Srinivasan, N. Z. Jhanjhi, y S. M. Islam, “AI and IoT-enabled smart exoskeleton system for rehabilitation of paralyzed people in connected communities” IEEE Access, vol. 9, pp. 80340–80350, 2021.
J] Q. Ai, W. Meng, F. Bensaali, X. Zhai, L. Liu, y N. Alaraje, “Editorial for FGCS special issue: intelligent IoT systems for healthcare and rehabilitation,” Future Generation Computer Systems, vol. 125, pp. 770–773, 2021.
M. A. M. Izhar, N. Ahmad, R. A. Dziyauddin, S. Sarip, N. A. Mashudi, J. SZA, y M. A. Alam Khan, “A smart IoT-based prototype system for rehabilitation monitoring,” International Journal of Integrated Engineering, vol. 15, no. 3, pp. 104–111, 2023.
A. Gonzalez, L. Garcia, J. Kilby, y P. McNair, "Robotic devices for paediatric rehabilitation: a review of design features," Biomedical Engineering Online, vol. 20, pp. 1–33, 2021.
N. Feizi, S. F. Atashzar, M. R. Kermani, y R. V. Patel, "Modeling and high-definition control of a smart electroadhesive actuator: Toward application in rehabilitation,"
IEEE Transactions on Medical Robotics and Bionics, vol. 4, no. 4, pp. 1057–1067, 2022.
S. K. Dutta, B. Sandeep Reddy, y S. K. Dwivedy, "Design of a two degrees of freedom actuator for rehabilitation robotic applications," en Machines, Mechanism and Robotics: Proceedings of iNaCoMM 2019, Springer Singapore, pp. 1189–1196, 2022.
JR. Chaichaowarat, S. Nishimura, T. Nozaki, y H. I. Krebs, "Work in the time of COVID-19: actuators and sensors for rehabilitation robotics," IEEJ Journal of Industry Applications, vol. 11, no. 2, pp. 256–265, 2022.
G. I. N. Ordóñez, "Diseño de un sistema embebido de sensores inerciales para rehabilitación de personas con discapacidad visual grave" 2023.
E. García, J. Orozco, G. Miño, C. Santillán, y C. Serrano, "Señales EEG integradas a sistemas embebidos para el control de un exoesqueleto de mano para rehabilitación motora," en Memorias del I Congreso Internacional de Bioingeniería y Sistemas Inteligentes de Rehabilitación.
E. N. Osella, L. Schiaffino, C. Tabernig, y S. Escobar, "Estrategias de control eficiente en sistemas de rehabilitación motora," Ciencia, Docencia y Tecnología Suplemento, vol. 13, no. 15, 2023.
D. N. Abril Almonacid y F. M. Hernández Hernández, "Tecnologías digitales en las modalidades terapéuticas y su relación en la educación de la fisioterapia: una revisión integrativa," Bachelor's thesis, Universidad de La Sabana, 2023.
O. I. Zambrano Orejuela, J. A. Rosales Acosta, W. R. Venegas Toro, P. J. Cruz Davalos, M. G. Granja Ramirez, y L. R. Soto Aymar, "PIMI-15-04-Control adaptativo basado en inteligencia artificial aplicado a un sistema mecatrónico fundado en un robot paralelo para la diagnosis y rehabilitación," 2015.
C. Herrera-Ligero, I. Bermejo Bosch, y J. L. Chaler Vilaseca, "La medida de resultados en Rehabilitación. Necesidad formativa clave en el siglo XXI, "Rehabilitación, vol. 56, no. 3, pp. 169-172, 2022.
A. Cisnal, D. Antolínez, J. P. Turiel, J. C. Fraile, y E. De La Fuente, "A versatile embedded platform for implementation of biocooperative control in upperlimb neuromotor rehabilitation scenarios," IEEE Access, vol. 11, pp. 35726–35736, 2023.
A. Cisnal, J. Pérez-Turiel, J. C. Fraile, D. Sierra, y E. de la Fuente, "RobHand: A hand exoskeleton with real-time EMG-driven embedded control. Quantifying hand gesture recognition delays for bilateral rehabilitation," IEEE Access, vol. 9, pp. 137809–137823, 2021.
T. Franco et al., "Motion sensors for knee angle recognition in muscle rehabilitation solutions," Sensors, vol. 22, no. 19, p. 7605, 2022.
U. Mayetin y S. Kucuk, "Design and experimental evaluation of a low-cost, portable, 3-DOF wrist rehabilitation robot with high physical human–robot interaction,"
Journal of Intelligent & Robotic Systems, vol. 106, no. 3, p. 65, 2022.
H. Vallery, J. Veneman, E. van Asseldonk, R. Ekkelenkamp, M. Buss, and H. y Der Kooij, "Compliant actuation of rehabilitation robots," IEEE Robotics & Automation Magazine, vol. 15, no. 3, pp. 60–69, 2008, doi: https://doi.org/10.1109/MRA.2008.927689
M. Pan, C. Yuan, X. Liang, T. Dong, T. Liu, J. Zhang, et al., "Soft actuators and robotic devices for rehabilitation and assistance," Adv. Intell. Syst., vol. 4, no. 4, p. 2100140, 2022.
L. Masia, M. Xiloyannis, D. B. Khanh, A. C. Wilson, S. Contu, y K. G. Yongtae, "Actuation for robot-aided rehabilitation: Design and control strategies," in Rehabilitation Robotics, pp. 47–61, Academic Press, 2018.
Descargas
Publicado
Cómo citar
Número
Sección
Licencia
Derechos de autor 2025 Revista Mexicana de Ingenieria Biomedica

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial 4.0.
Una vez que el artículo es aceptado para su publicación en la RMIB, se les solicitará al autor principal o de correspondencia que revisen y firman las cartas de cesión de derechos correspondientes para llevar a cabo la autorización para la publicación del artículo. En dicho documento se autoriza a la RMIB a publicar, en cualquier medio sin limitaciones y sin ningún costo. Los autores pueden reutilizar partes del artículo en otros documentos y reproducir parte o la totalidad para su uso personal siempre que se haga referencia bibliográfica al RMIB. No obstante, todo tipo de publicación fuera de las publicaciones académicas del autor correspondiente o para otro tipo de trabajos derivados y publicados necesitaran de un permiso escrito de la RMIB.